


手术动力装置
这四个型号区别不大,主要是尺寸,不带M的直接一个CMOS,但是这样的尺寸对镜头要求极高,那么带M的就是自带了镜头。另外46和48的CMOS价格差一半,然后就是尺寸上面差一些。
该摄像头模块源自超小型图像传感器OV6948 ,该传感器荣获吉尼斯世界纪录“最小的商用图像传感器*”,其尺寸为0.575 mm x 0.575 mm。这个完整的模块可以集成到直径小至 1.0 毫米的一次性导丝、导管或内窥镜中。凭借该相机的小尺寸和 200 x 200 或 40 KPixel 背照式分辨率,可以从最狭窄的血管内捕获高质量图像,用于神经、眼科、耳鼻喉、心脏、脊柱、泌尿科、妇科和关节镜手术。
OVM6948 是唯一具有背面照明的超小型“尖端芯片”相机,可提供卓越的图像质量和更好的低光性能,有助于减少LED热量,并提高灵敏度。它为一次性导丝、导管和内窥镜提供了紧凑、高质量的解决方案,这些产品的需求不断增长,因为它们能够减少交叉污染风险、停机效率低下以及与可重复使用内窥镜的维修、术前测试和灭菌相关的成本。受益于传感器仅 25 mW 的低功耗,产生的热量更少,从而提高患者舒适度和灵活的手术持续时间。
该相机模块的其他主要功能包括 120 度宽视场和 3 毫米至 30 毫米的扩展对焦范围。其图像阵列能够以高达每秒 30 帧的速度捕获 200 x 200 分辨率的图像和视频,其模拟输出可以以最小的噪音传输超过 4 米。 但是注意,OVM的型号不在这颗芯片的
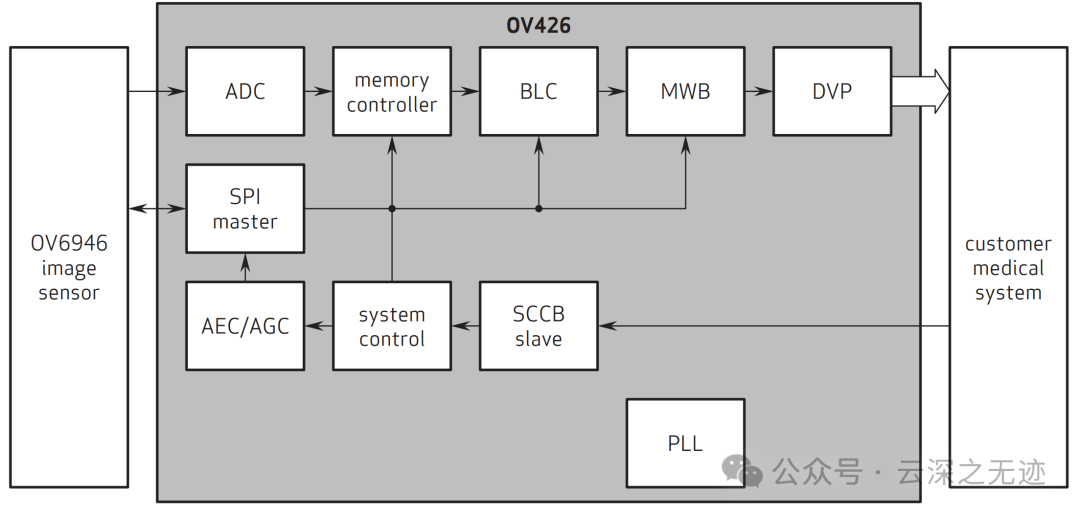
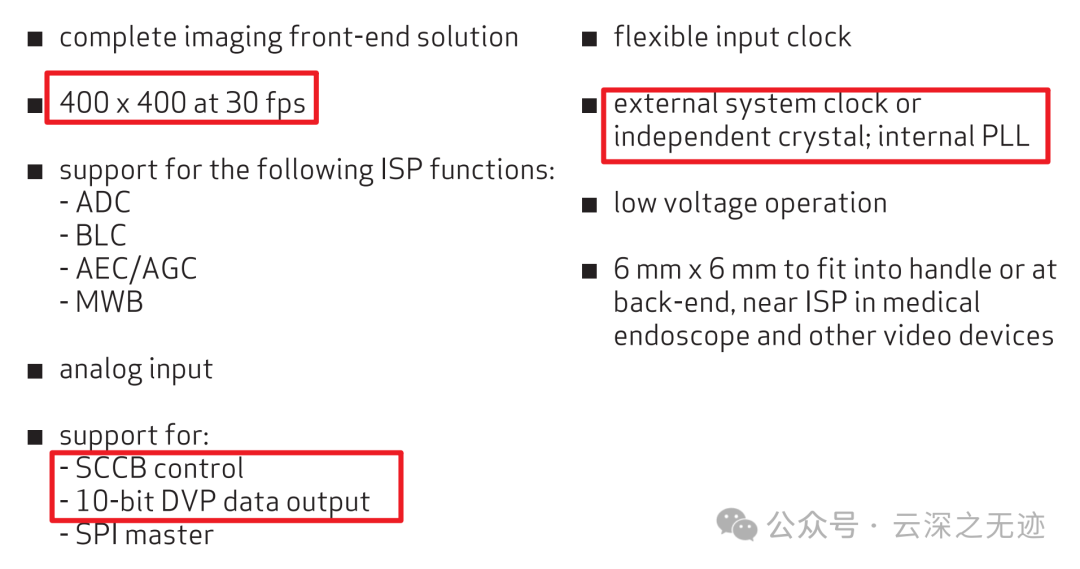
OV426 是适用于OV6946和OV6948等小型医疗图像传感器的单芯片解决方案。OV426 使用内置 A/D转换器ADC)、黑电平校准 (BLC)、AEC/AGC 和最终数字视频并行输出 (DVP) 提供集成模数数据转换。
在操作期间,OV426 对OV6946 的专有模拟输出进行解码,并通过ADC 将其数字化。生成的数字信号将由数字信号处理器DSP)进行处理,最后发出标准的DVP输出。
DVP总线M左右,而且走线长度不能过长,所有DVP最大速率最好控制在72M以下,PCBlayout较容易画;MIPI总线速率lvds接口耦合,走线必须差分等长,并且需要保护,故对PCB走线以及阻抗控制要求高一点(一般来讲差分阻抗要求在85欧姆~125欧姆之间)。 DVP是并口,需要PCLK、VSYNC、HSYNC、D[0:11]——可以是8/10/12bit数据,具体情况要看ISP或baseband是否支持;MIPI是LVDS低压差分串口,只需要要CLKP/N、DATAP/N——最大支持4-lane,一般2-lane可以搞定。MIPI接口比DVP的接口信号线少,由于是低压差分信号,产生的干扰小,抗干扰能力也强。最重要的是DVP接口在信号完整性方面受限制,速率也受限制。500W还可以勉强用DVP,800W及以上都采用MIPI接口。 这里算一下这些相机的数据输出量: RGB 彩色图像的每个像素有 24 位深度(每个通道 8 位)。
然后,将其转换为字节,除以 8,以获得每像素的字节数。 最后,将每像素的字节数乘以像素数和每秒的帧数,就可以得到每秒的总数据量。以下是计算过程: 每个像素的字节数 = 24 位 / 8 = 3 字节 每秒的总数据量 = 每像素的字节数 × 像素数 × 帧率 每秒的总数据量 = 3 字节/像素 × 160,000 像素 × 30 帧/秒 每秒的总数据量 ≈ 14,400,000 字节/秒 所以,对于一个 160k pixels、30fps 的 RGB 彩色摄像头,输出的数据量大约是每秒 14.4 MB。
至于为什么是方的摄像头,感觉内窥镜都是圆形的,所以CMOS也都是方形的,也就是400x400这样的。
特别的,在内是黑暗的,所以LED和CMOS之间互相闭环来形成这种灯光的控制,LED使用的是LED驱动器恒流源驱动,恒流源。
如果你搜索相关的材料,可能会看到广东这家企业做的东西。我感觉挺巧妙的,也就是内窥镜,他使用了一个模拟的电视芯片方案来接收(应该是这样),FPGA来把这个转换到HDMI,注意HDMI输入转CSI-2接口,大家可能都是使用这个芯片,东芝的。
当线m , 或是线材品质较差时, 噪声就容易由4MHz输入时钟导出并耦合到模拟视频(Vout),导致影像发生竖条纹(Vertical noise pattern)。
版权所有 (©) 雷竞技入口-雷竞技官网登陆(中国)欧洲杯下注集团 All Rights Reserved.
电话 : +86-23-68692230 传真 : +86-23-63211079
技术支持 : 雷竞技入口
